General Creep function advice for the Mach-1 Motion software
Here are some recommended starting parameters:
- Start at P = 0.001, I = 0.
- If load (e.g. 3000gf) was not reached, increase to P = 0.01, I = 0.
- Repeat with by increasing again to P = 0.1 if load was again not reached.
- If the motor starts to overcorrect and oscillate up and down, reduce P.
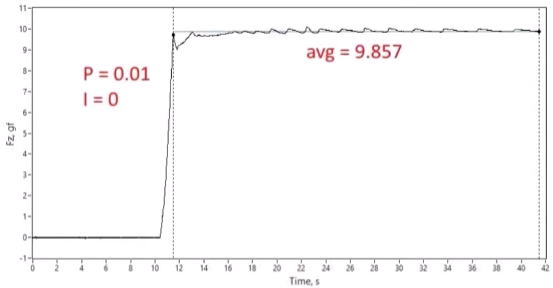
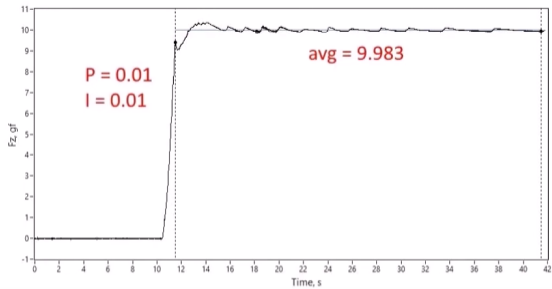
- Once the (e.g. 3000gf) setpoint is reached, but the load doesn’t stay at the setpoint, you can start to increase I = 0.001, 0.01, 0.1, etc. to correct this long-term error.
In general, proportional gain (P) is how fast and aggressively the motor corrects its position. Integral gain (I) corrects any constant error over the creep time.
Here is a video with some examples: YouTube - Mach-1 User Manual - Part 2d - Function Creep
Example 1: P is too high and starts oscillating/overcorrectingExample 2: Effect of increasing I for a 10gf setpoint
Related Articles
NI Device Loader Service not running - No data stream/No Load Cell Detected when opening Mach-1 Motion or freeze when clicking "Start", then Error -88705 after a few minutes
The general Error -88705 can be solved using the following method: https://support.biomomentum.com/portal/en/kb/articles/daqmx-self-test-error-88705 In this specific case of the error, there is a blank screen (no load cell data is shown) for a few ...Issues with Trend Micro Antivirus Software
There have been a few issues noticed with specifically Trend Micro antivirus software: https://www.trendmicro.com/. In particular, this antivirus software interferes with incoming force and position data from the Mach-1. Some examples include: ...How to perform a puncture test using the Mach-1
Equipment: https://www.biomomentum.com/accessories/sample-holder-puncture-fixtures/ https://www.biomomentum.com/accessories/kit-of-spherical-indenters/ https://www.biomomentum.com/mechanical-testers/mach-1-v500c/ There is no general standard for the ...How to prevent water damage/infiltration into Mach-1 motors
When using water or other solution with the Biomomentum Mach-1, it is possible to misuse the accessories and leak water into the Mach-1's motors underneath. To prevent water damage in the Mach-1 X, Y and Torsion axes, it is recommended to use bench ...DAQmx Self-Test (Error: -88705)
NOTE: in Mach-1 Motion version 4.5.0.1+ (ESP302), the software will automatically search through all DAQ ports. The method below is not necessary. This error is usually caused by having an incorrect DAQ# in the Mach-1 Motion configuration file. ...